|
Unidades: 0
|
Total -
|
|
Envío gratis por pedido superior a 100€ |
|


HDs y Mobile Mapping Instrumentos para construcción RPA Topografía e ingeniería
10/jun./2023 4:17

UgCS para misiones LIDAR con drones. El LIDAR (Light Detection and Ranging) está ganando popularidad entre los topógrafos profesionales con drones. Sin embargo, para obtener resultados de escaneo LIDAR precisos, un piloto necesita seguir algunas pautas:
Hacerlo todo bien es imposible en un modo de vuelo manual y extremadamente difícil con herramientas de planificación de vuelo adaptadas para levantamientos fotogramétricos. El conjunto de herramientas UgCS LIDAR de SPH Engineering libera todo el potencial de los LIDARs haciendo la detección remota más efectiva sin errores humanos:
Veamos con más detalle cómo funcionan todas estas cosas.
UgCS para misiones LIDAR con drones.. La inicialización de la IMU se realiza normalmente al menos dos veces por vuelo. Antes de comenzar la exploración y después de finalizarla. Opcionalmente, el piloto puede pausar el vuelo y realizar una inicialización IMU adicional para restablecer los errores acumulados. Por eso hemos implementado esta función como un comando del dron para que el piloto pueda ejecutarla en cualquier momento. Para que este comando se ejecute, el dron debe estar ya en el aire.
Diferentes fabricantes de LIDAR recomiendan varios patrones. En UgCS, soportamos los dos más populares: figura ocho y figura U.
El objetivo principal del patrón de calibración es poner los drones a su máxima capacidad en términos de ángulo de balanceo. Eso significa literalmente que un piloto quiere pasar la figura del ocho a la máxima velocidad posible, lo que hará una calibración IMU adecuada.
Para añadir la figura, un piloto hace clic en el mapa para especificar un centro y una altitud y, a continuación, la anchura, la longitud, la velocidad, la altitud y el ángulo de dirección de los giros.
| Parámetro | Definición |
| Velocidad m/s | Velocidad horizontal del dron, m/s |
| Anchura, m | Anchura del cuadro delimitador de la figura. Por defecto: 30 metros |
| Longitud, m | Longitud del cuadro delimitador de la figura Altitud, m |
| Ángulo de dirección | Especifica el acimut de las pasadas de avance |
| Altitud, m | Altitud sobre la elevación en el centro de la figura |
| Nº de ciclos | Número de ciclos |
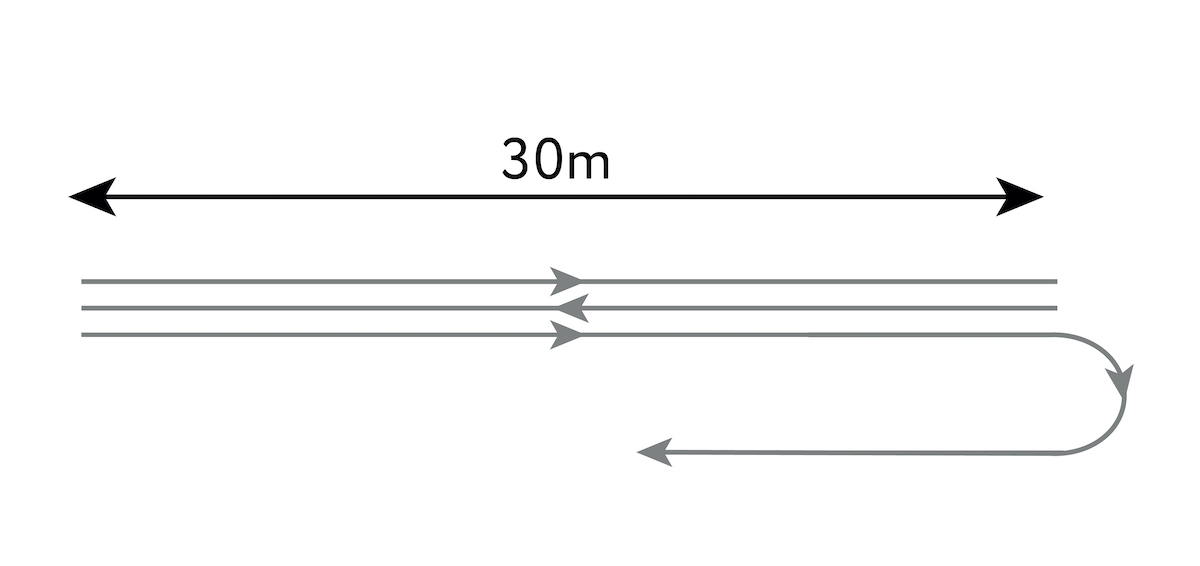
Figura 1: Giros en forma de U
Los parámetros de entrada son muy similares a los de ocho cifras. Sin embargo, la trayectoria generada es diferente. El dron hace varias pasadas de un lado a otro y luego da una vuelta en U (Figura 1). Para añadir la figura, el piloto hace clic en el mapa para especificar un centro y una altitud y, a continuación, la anchura, la longitud, la velocidad, la altitud y el ángulo de dirección de los giros.
| Parámetro | Definición |
| Velocidad m/s | Velocidad horizontal del dron, m/s |
| Anchura, m | Anchura del cuadro delimitador de la figura. Por defecto: 30 metros |
| Longitud, m | Longitud del cuadro delimitador de la figura Altitud, m |
| Ángulo de dirección | Especifica el acimut de las pasadas de avance |
| Altitud, m | Altitud sobre la elevación en el centro de la figura |
| Nº de ciclos | Número de ciclos |
La prospección LIDAR suele emplear los siguientes patrones:
Los drones pueden estar equipados con un LIDAR o con un LIDAR y una cámara fotográfica. En este último caso, hay que tener en cuenta el FOV del LIDAR y el FOV de la cámara y elegir el más pequeño.
El escaneo de áreas con LIDAR es útil para lo siguiente: obras de construcción, minas a cielo abierto, centrales eléctricas, vertederos, arqueología y silvicultura.
El piloto debe especificar lo siguiente
El área puede dividirse en las siguientes trayectorias:
El escaneado de corredores con LIDAR es útil para lo siguiente: carreteras, líneas eléctricas y tuberías.
El corredor puede dividirse en las siguientes trayectorias:
En el caso de la geometría del corredor, el usuario especifica una línea central y una anchura.
Además de la forma general de la trayectoria, los pilotos introducen los siguientes datos:
| Parámetro | Definición |
| FOV | Campo de visión del LIDAR, grados |
| Modo altitud | AGL – Above Ground Level (sobre el nivel del suelo) significa que el dron seguirá el modelo digital de elevación. AMSL – Above Mean Sea Level significa que el dron volará recto a una altitud absoluta constante. |
| Altura de vuelo, m | Altitud en metros que depende del modo de altitud |
| Distancia entre líneas Solapamiento lateral, en %. Distancia lateral, m |
Hay 2 opciones. Un piloto puede especificar el solapamiento lateral en porcentaje o la distancia lateral en metros
En caso de porcentaje, el software calculará el espaciado entre líneas basándose en el FOV y la altura de vuelo |
| Velocidad de vuelo, m/s | Velocidad del dron |
| Cámara | Lista de perfiles preconfigurados de cámaras (opcional) |
| Ángulo de dirección | Especifica el acimut de las pasadas hacia delante. Disponible sólo para Área. Oculto para el corredor |
| Doble rejilla | Una casilla de verificación. Si está marcada, la trayectoria es de rejilla doble; si no, de rejilla simple (serpiente). |
| Tipo de giro |
|
| Ángulo de giro del bucle, grados | El valor máximo por debajo del cual el software añadirá bucles para los giros. Para valores superiores a «Loop turn angle», se utilizarán giros estándar.
|
| Vuelo recto después del giro, m | Para los LIDARs, es crucial tener al menos X metros de vuelo recto después de cada giro antes de entrar en el siguiente segmento. Predeterminado: 10 metros |
| Radio de esquina | Radio de giro adaptable |
| Zona tampón | Amplía la exploración en todas las direcciones en una cantidad determinada de metros*.
*Disponible sólo para Área LIDAR |
| Sobreimpulso | Extiende el paso hacia delante una cantidad especificada de metros. El sobrepaso da al dron algo de espacio para hacer un giro y volver a la zona de exploración lo más recto posible.
En caso de sobrepasar el corredor, sólo se aplica a los giros entre pasadas paralelas en un modo multipase*. *Disponible sólo para Área LIDAR |
| Velocidad de rebasamiento | Velocidad del dron para segmentos de rebasamiento*.
*Disponible sólo para Área LIDAR |
| Ejecución de la acción | Cómo ejecutar las acciones:
|
| Tolerancia AGL | Permite minimizar el número de waypoints sintetizados, generados para mantener constante la altitud sobre el terreno. Cuanto mayor sea el valor, menos waypoints se generarán |
| Evitar obstáculos | |
| Ninguna acción en el último punto | No dispare la cámara después del último punto si el segmento |
El piloto siempre especifica el FOV manualmente. La suposición general es que un dron siempre vuela a altitudes inferiores al alcance del LIDAR; es decir, el piloto define el FOV y la altitud de forma independiente. Estos parámetros afectan al espaciado entre líneas.
El espaciado entre líneas se calcula de forma diferente para los modos AGL y AMSL:
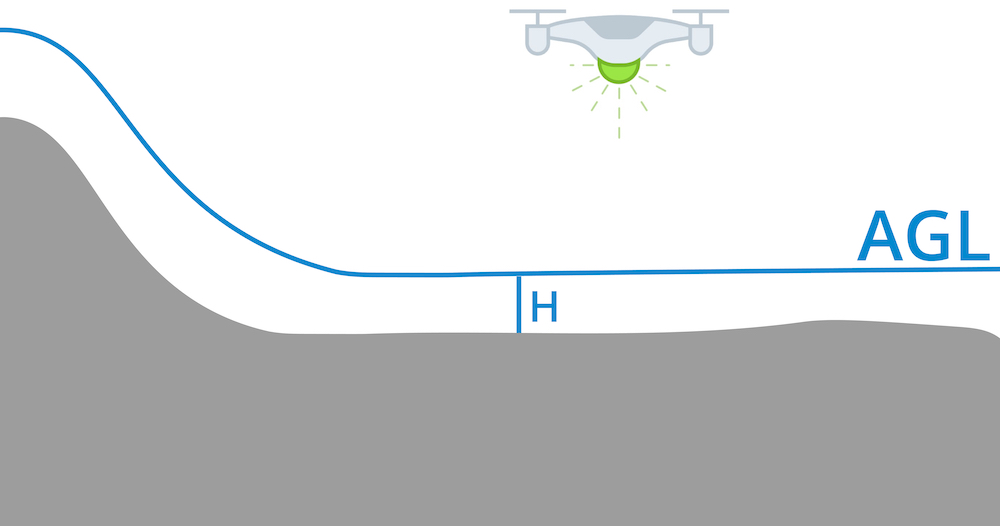
Figura 2a. Cálculo de la distancia entre líneas para AGL
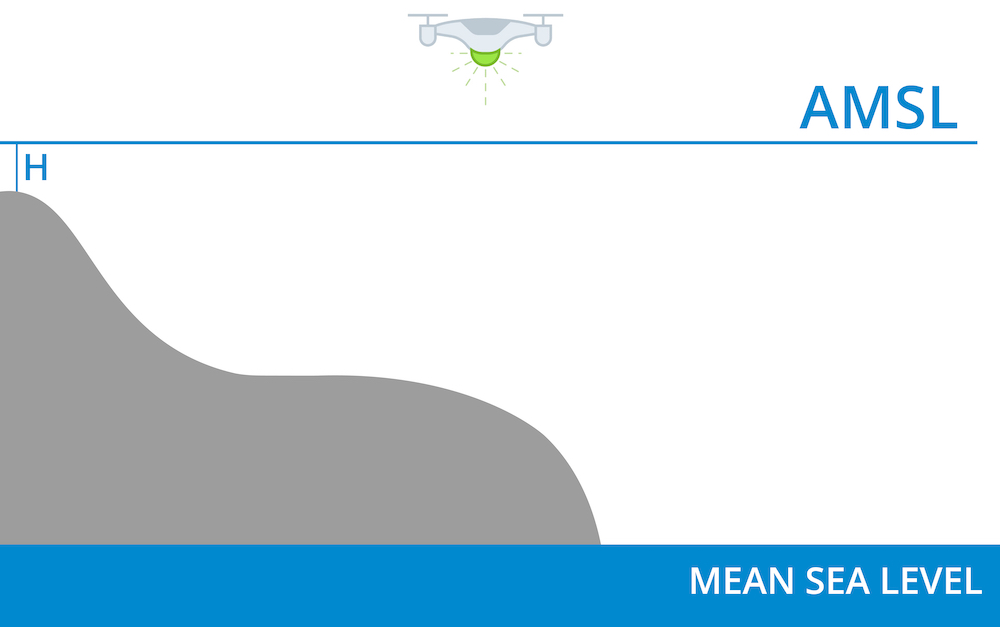
Figura 2b. Cálculo de la distancia entre líneas para AMSL
SW (Anchura de exploración) = 2*H*tan (FOV/2)
Espacio entre líneas (distancia lateral) = SW*(1-Porcentaje de solapamiento lateral)
La calidad de los datos LIDAR se ve muy influida por la forma en que el dron realiza los giros. Lo más importante es reducir las sacudidas del sensor y seguir la trayectoria con la mayor precisión posible.
El giro debe parecerse a un viraje normal para ángulos superiores a «Ángulo de giro en bucle» grados (Figura 3).
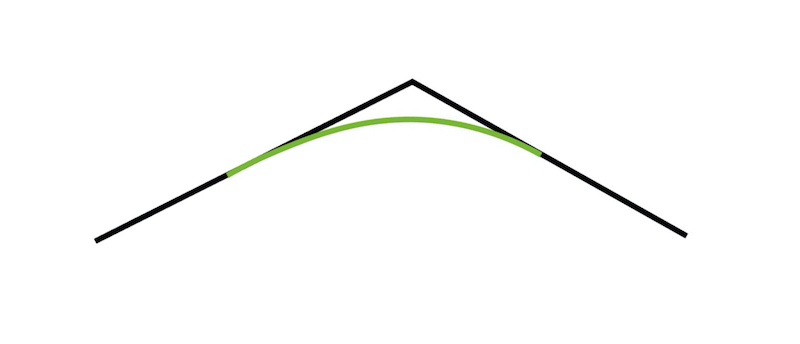
Figura 3. La trayectoria del giro
El radio del giro en banco debe ser el especificado en «Radio de giro en banco».
Para ángulos inferiores o iguales a «Ángulo de giro en bucle» grados, los giros pueden parecer una maniobra en bucle (Figura 4).
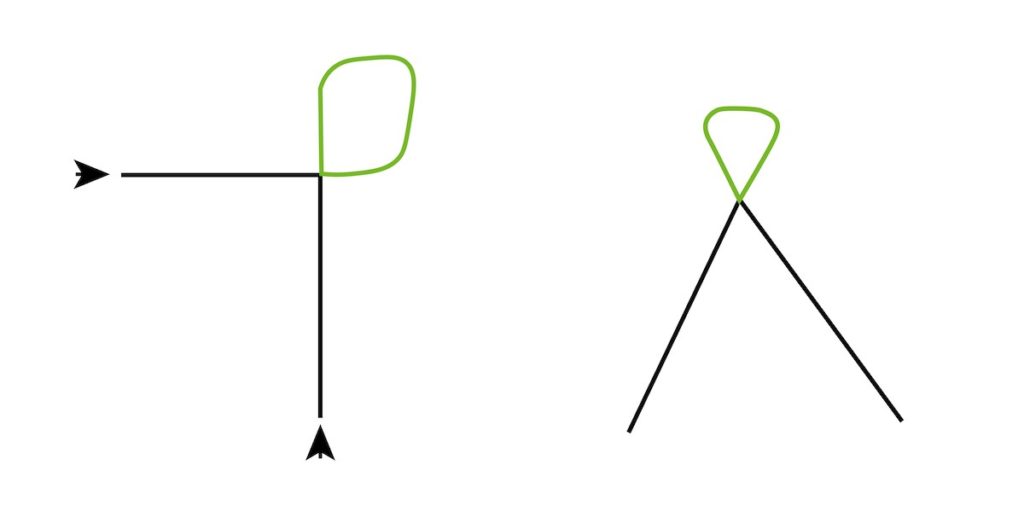
Figura 4. Trayectoria de los giros en bucle
Importante: después del giro en bucle, antes de entrar en el siguiente segmento, el dron debe volar «Tiempo de vuelo recto después del giro» segundos seguidos.
Los giros en bucle no se aplican a los giros en segmentos de sobrevuelo. En caso de giros de sobreimpulso, se aplica un patrón de inclinación.
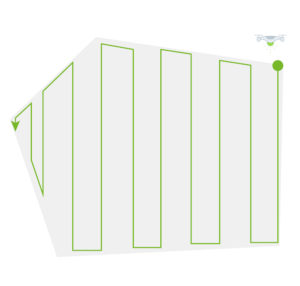
Por defecto, se asume que la trayectoria y la huella LIDAR están dentro del corredor o área. Se aplica un búfer de área a todas las áreas de vuelo para mejorar la cobertura en los bordes ampliando la forma original. El rebasamiento amplía las pasadas hacia delante para realizar giros fuera de la trayectoria principal.
Sobreimpulso = 0Tampón de área = 0 |
 |
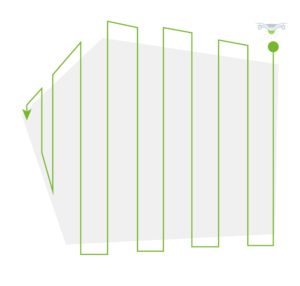
Sobreimpulso > 0Búfer de área = 0 |
 |
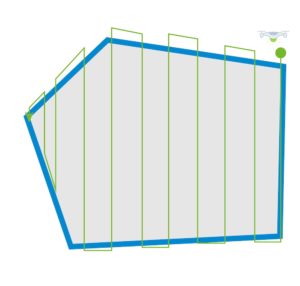
Sobreimpulso = 0Búfer de área > 0 |
 |
Sobreimpulso > 0Búfer de área > 0 |
 |
El conjunto de herramientas UgCS LIDAR es actualmente soportado para drones DJI M300, M600, M210/200.



Según la Ley Orgánica 15/1999, de Protección de Datos de Carácter Personal, se le informa que sus datos serán incorporados a un fichero d Usuarios titularidad de ACRE Soluciones Topográficas, S.L. y otorga el consentimiento para el envío de información.
La dirección donde podrás ejercer tus derechos de acceso, cancelación y oposición de tus datos es: Autovía A-42. km. 35-36 Salida Yeles. Pol. Ind. Los Pradillos, nave 13, Illescas (Toledo), Comunidad de Castilla - La Mancha, España.